Nếu như bạn đang muốn đổi mới robot của mình thành một robot auto ? Một chú Robot có chức năng điều hướng trong một môi trường mà không cần đến sự tham gia của con bạn ? Vậy nội dung bài viết này lý giải làm robot dò đường sử dụng Arduino này của Uniduc và đúng là những gì nhiều người đang cần.
Bạn đang xem: Hướng dẫn làm robot dò đường
Trên thực tiễn việc tạo nên một chú Robot di động là 1 trong việc tuy rất khó nhưng hầu như ai cũng có thể làm được. Nếu nếu khách hàng là một bên sản xuất, một nhà phát triển hay như là một người nghiệp dư không tồn tại kinh nghiệm trong lĩnh vực chế tạo Robot đều phải có thể sản xuất ra đều chú Robot dò đường. .
Bài viết sau đây sẽ phía dẫn bạn đọc mỗi bước làm robot dò đường sử dụng Arduino. Cùng với những cách dưới đây, độc giả hoàn toàn hoàn toàn có thể biến những ô tô đồ chơi RC của mình thành Robot trường đoản cú lái, tránh vật cản vật, thậm chí còn cả sản phẩm công nghệ hút những vết bụi tự động.
Tổng quát về hướng dẫn làm robot dò đường sử dụng Arduino

Tổng quát về phía dẫn làm robot dò đường cần sử dụng Arduino
Trong bài hướng dẫn này, Uniduc sử dụng bộ vi điều khiển Arduino. Và trải qua Arduino, shop chúng tôi tạo ra nhị hành trình khác nhau cho Robot.
Với hành trình đầu tiên, Robot sẽ auto đi xung quanh không gian thử nghiệm cùng tránh tất cả chướng hổ ngươi vật trên phố chúng đi. Để góp Robot tránh đồ cản tốt, chúng tôi cài đặt thêm mang lại nó hệ thống hai cảm biến siêu âm.
Trong khi chương trình đầu tiên dùng bộ cảm ứng siêu âm để dấn diện thứ cản, thì ở hành trình thứ hai, chúng tôi sử dụng mảng 2-D. Mảng 2-D này phụ trách vạch ra quanh vùng xung quanh và tích lũy các số liệu. Sau khi có số liệu, Robot đang nhận diện được gần như chướng không tự tin vật bao phủ nó.
Hướng dẫn làm cho robot dò đường sử dụng Arduino
Bước 1: sẵn sàng vật liệu

Chuẩn bị vật liệu
Cấu trúc
Về phần cấu trúc làm khuôn, chúng ta hoàn toàn rất có thể dùng bất kỳ vật liệu nào nhằm tạo kết cấu bạn muốn muốn. Trong bài bác hướng dẫn này, Uniduc đã chọn Vex làm khung cho Robot của mình.
Thực ra, chúng ta cũng có thể làm khung ở bất kỳ giai đoạn như thế nào cả quy trình không độc nhất vô nhị thiết là quy trình đầu tiên. Dẫu vậy Uniduc vẫn khuyên chúng ta nên làm size từ đầu. Cũng chính vì cho mặc dù bạn sử dụng động cơ khác nhau thì cỗ khung cũng tương tự như nhau.
Trong bài này, Uniduc sử dụng động cơ Vex và cảm biến Vex. Dưới đây là toàn cục nguyên đồ dùng liệu chúng ta sẽ cần để làm robot dò đường dùng Arduino.
2 bộ cảm biến siêu âm.4 Servos (5 cho funsies).Arduino ( Uno)Bảng Perf (Radio Shack 276-150) Rất những dây.2 sạc pin 9,6 V ( pin sạc Vex ).1 sạc 9V (để cấp cho nguồn đến Arduino).4 bánh xe (đường kính 5 ”).5 những loại phần cứng (đai ốc, bu lông, v.v.).Băng keo.Bước 2: Cơ khí

Cơ khí
Xây dựng một cơ sở kiên cố là câu hỏi làm đầu tiên và vô cùng đặc biệt quan trọng khi chế tạo nên Robot. Ở bước này, bạn cũng có thể chế tạo theo cách bạn muốn.
Trong bài bác viêt này, Uniduc đã sản xuất ra 2 nguyên mẫu không giống nhau của một chú Robot. Ở quy mô đầu tiên, chúng tôi tạo đến Robot của chính bản thân mình có ngoài mặt giống xe pháo tải. Với kích thước và kết cấu như vậy, chắc chắn Robot khó xoay đầu và dịch chuyển chậm hơn.
Do kia ở mô hình thứ hai, shop chúng tôi đã đổi sang nguyên mẫu gồm kích thước nhỏ tuổi hơn với kết cấu gọn hơn.
Bánh xeỞ cả bên dưới 2 mô hình, shop chúng tôi gắn thêm những servo để tạo ra một không gian vừa đủ nhằm gắn bánh xe cộ agv.
Với phần bánh xe, chúng ta cũng có thể lựa chọn sử dụng ổ đĩa hai bánh và ổ đĩa tứ bánh. Điều này sẽ tùy trực thuộc vào độ mạnh mẽ của Servo. Còn trong nội dung bài viết hôm nay, Uniduc đang lựa chọn 1 ổ đĩa tứ bánh. Có một giữ ý nhỏ dại khi bạn lắp ổ đĩa bánh xe cộ là các bạn nhớ chừa một không gian đủ để lắp PCB, Arduino và pin nhé.
Hướng dẫn lắp bánh xePhần tiếp theo sau Uniduc vẫn gắn thêm các bánh xe pháo vào những servo.
Uniduc sẽ thêm các thành phần tiếp viện bên ngoài các bánh xe pháo để thắt chặt và cố định phía vị trí kia của trục cùng giữ mang lại chúng không trở nên bung ra.
Hai bánh xe phụ nghỉ ngơi phía trước được nâng cao để ví như robot chạy vào lề mặt đường hoặc lên khu vực cao hơn, Robot rất có thể leo lên trên mặt đó. Sau đó, công ty chúng tôi dán keo dính vào hai bánh sau để giảm ma cạnh bên của Robot nhằm nó trở lại dễ hơn.
Giá đỡ pinSau khi vẫn lắp ráp kết thúc phần bánh xe cộ vào Servo, bọn chúng tôi bước đầu chuyển sang đính thêm giá đỡ pin. Thay vị sạc pin, chúng tôi sẽ lựa chọn lấy một bộ sạc pin Vex cùng hack nó nhằm nó truyền tích điện đến các bánh xe pháo hơn.
Tiếp theo, bạn cần lấy bảng mạch bên trong ra với khử những dây dẫn âm với dương đi cho cổng sạc.
Sau đó, hãy hàn các dây màu black từ hai rất pin lại với nhau với hàn các dây red color với nhau. Tiếp theo, các bạn hãy hàn tiếp từng dây vào dây đỏ và đen. Kế tiếp cắm trực tiếp vào PCB của bạn.
Hệ thống cảm biến siêu âmSau khi sẽ lắp hoàn thành giá đỡ pin, bạn phải lắp thêm một giá bán đỡ phía trước nhằm gắn khối hệ thống cảm biến khôn cùng âm mang đến Robot.
Vị trí của hệ thống cảm biến siêu âm này sẽ dựa vào vào tác dụng của Robot. Điều đó tất cả nghĩa là bạn có nhu cầu Robot vượt lên trên nữa thì có thể gắn bộ cảm biến siêu âm xoay ở vị trí trung trọng điểm của Robot.
Chúng tôi đã đưa vào các hình hình ảnh về xây dựng Mark II của bọn chúng tôi. Là 1 ổ đĩa tứ bánh tiêu chuẩn đồng thời bao gồm thêm thiết kế bánh sơ cua. Bánh sơ cua vẫn lập trình nặng nề và phức tạp hơn nhưng lại nó có thể chấp nhận được truyền động cha chiều.
Bước 3: Bảng mạch điện tử của robot dò đường dùng arduino

Các thiết bị điện tử đến robot này không khó lắm. Nếu bạn sử dụng ý tưởng phát minh giá đỡ sạc pin từ bên trên xuống, thì 9.6 của bạn sẽ được kết nối tuy nhiên song. Nếu như khách hàng không sử dụng phát minh đó, hãy kết nối tuy nhiên song những pin của bạn. Sau đó, theo dõi và quan sát hình hình ảnh của bảng mạch được đăng tại đây.
Tuy nhiên, hãy cẩn trọng vì tùy nằm trong vào kích cỡ đế của bạn, dây servo của bạn có thể không tiếp cận được với bảng mạch.
Uniduc đang áp dụng cùng một dây biểu hiện cho servos 1 với 2 và một dây biểu hiện khác đến servos 3 cùng 4. Điều này là do servos 1 cùng 2 phải luôn có và một tín hiệu trong lúc servos 3 và 4 phải luôn có cùng một biểu lộ (vì bọn chúng ở và một phía).
Nếu bạn có nhu cầu thêm một cảm ứng khác hoặc một servo khác, chỉ việc làm theo mô hình tương tự như vào hình kết nối tín hiệu với chân Arduino, 5V sang màu đỏ và nối đất thành màu sắc đen. Hãy hãy nhờ rằng mặt khu đất trên cồn cơ phải được kết nối với cả màu black Arduino với màu đen của pin.
Ngoài ra, Uniduc cũng gắn thêm một bộ mã hóa con quay trên một trong số động cơ của chính mình chỉ để đo xem nó sẽ quay được bao xa. Mặc dù điều này trọn vẹn là không bắt buộc thiết.
Trên phía trên là nội dung bài viết hướng dẫn bí quyết làm robot dò đường dùng arduino. Những kiến thức và kỹ năng liên quan đến robot dò đường có thể tìm hiểu thêm tại đây.
Bài viết này ra mắt đến các bạn cách làm cho một robot dò đường dễ dàng và đơn giản chỉ sử dụng linh phụ kiện điện tử thông thường, chưa dùng đến IC hay các linh kiện cao cấp hơn. Robot dò mặt đường là loại robot có thể đi theo 1 mặt đường vẽ hay hoàn toàn có thể là băng bám đen. Thật ra, robot dò đường là 1 trong những biến thể quan trọng của robot hướng sáng.
Sở dĩ nói như vậy là do chúng tất cả cùng nguyên tắc vận động là sử dụng cảm biến quang năng lượng điện (quang trở hoặc diode hồng ngoại) để so sánh cường ánh sáng từ đó điều chỉnh hướng đi đam mê hợp.Tuy nhiên, sinh sống robot dò đường, cảm biến được bố trí gần mặt đường và nguồn sáng để so sánh bây giờ do bao gồm robot tạo ra ra. Nhưng vì chưng đâu lại sở hữu sự xô lệch về cường độ sáng. Câu vấn đáp nằm ở đường vẽ, con đường vẽ này còn có tính chất khác cùng với xung quanh, thường xuyên thì nó bao gồm màu đen để hấp thụ ánh sáng. Khi robot đi lệch vào vùng bao gồm vạch vẽ, ánh nắng phát ra trường đoản cú robot không sự phản xạ lại như bình thường mà bị đường kẻ hấp thụ một phần làm xô lệch độ sáng thân 2 cảm biến. Việc còn lại là kiến thiết sao cho robot có hành vi khắc phục sự xô lệch đó với ta dành được loại robot đi theo đường vẽ.* chuẩn bị:– Linh kiện:– 1 con Opamp một số loại 8 chân LM393 (2 kênh) hoặc loại 14 chân (4 kênh) LM324. Nếu không tồn tại loại LM hoàn toàn có thể xài nhiều loại khác, như HA chẳng hạn.– 2 nhỏ BJT một số loại NPN C1815 (hoặc một số loại khác cũng được).– 2 quang quẻ trở.– 2 led siu sáng (trắng).– 6 điện trở 10k.– 2 mô tơ, các loại cỡ 5V, có thể lấy tự xe đồ nghịch của trẻ em (ở phía trên tớ lấy từ ổ CD-Rom 1 chiếc và chôm của đứa bạn 1 cái).– Nguồn thực hiện 9V hoặc 4.5V (ở trên đây mình xài mối cung cấp 9V).– 2 điện trở hạn loại cho led phạt 1k (nếu xài nguồn 9V) và khoảng 220 ôm nếu xài nguồn 4.5V).
– Và các đồ phụ gia tráng trí khác, đa phần là led thêm vào cho đẹp, một vài loại dắt cắm, công tắc…– Đồ dùng khác: mỏ hàn, chì hàn, kéo, keo dính đen (làm vạch)…
* trả lời thực hiện:+ Phần mạch (ta bóc tách riêng thành 2 phần, một phần cảm trở nên và 1 phần mạch chính cho dễ lắp đặt):1. Thành phần “cảm biến”-Cách làm:Sử dụng 2 quang đãng trở, 2 led phát, 2 trở hạn dòng cho led phát. Mắc theo sơ đồ gia dụng sau:
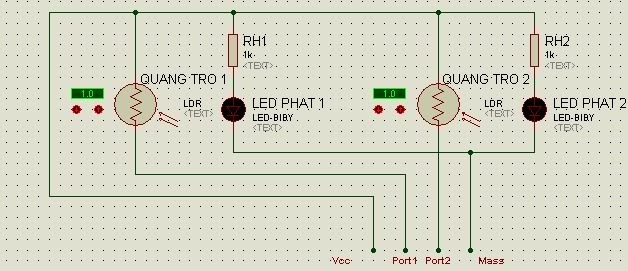
Đặt 2 quang quẻ trở biện pháp nhau khoảng 3.5cm-4cm, dùng keo dính đen quấn quanh quang quẻ trở để kháng nhiễu. Ở trên đây mình sử dụng thêm 2 công tắc nguồn cho led phát nhằm tắc ”khi đề xuất thiết”.
Xem thêm: Luật Đấu Thầu Mới Nhất 2022 Và Nghị Định Hướng Dẫn Luật Đấu Thầu
-Nguyên lý hoạt động:Khi có ánh nắng thì năng lượng điện trở của quang trở sẽ giảm và ngược lại, điện trở của nó chuyển đổi cỡ từ 5k (khi bao gồm ánh sáng) mang đến 100k (không tất cả ánh sáng), ta áp dụng 2 led phát làm nguồn sáng mang lại nó.=> khi chạm chán nền trắng, ánh sáng sẽ sự phản xạ lên quang trở làm cho điện trở nó giảm đi và khi gặp mặt vạch đen (băng keo dán đen) thì ánh nắng sẽ khó phản xạ đề nghị quang trở dấn ít ánh sáng => trở nó tăng. Trường đoản cú đó phụ thuộc vào 2 quang trở, robot có thể phân biệt được vạch black trên nền white (dưới sự cung ứng của opamp so sánh).